|
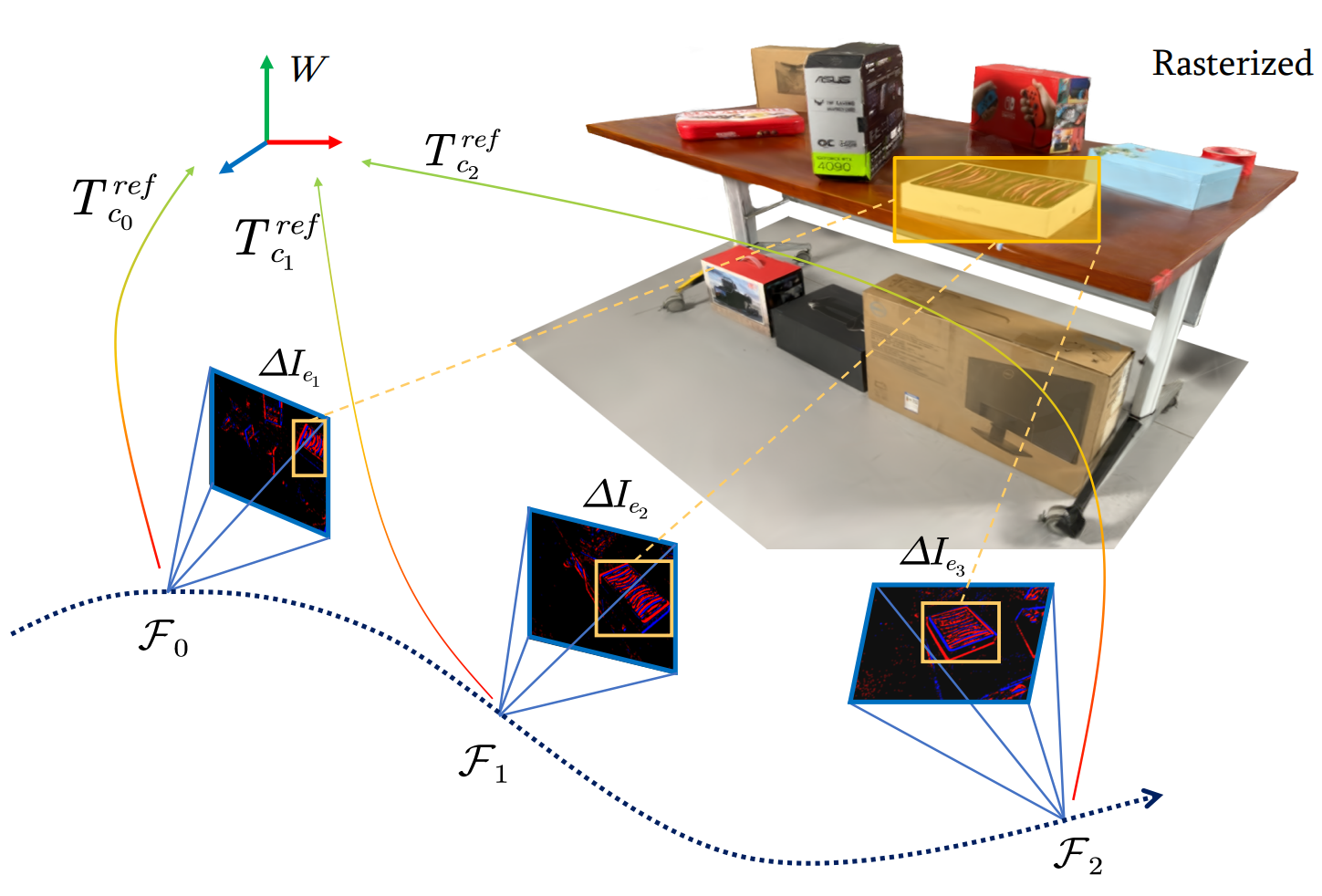
GS-EVT: Cross-Modal Event Camera Tracking based on Gaussian Splatting Tao Liu, Runze Yuan, Yi'ang Ju, Xun Xu, Jiaqi Yang, Xiangting Meng, Xavier Lagorce, Laurent Kneip ICRA 2025 Paper | Code | Video This paper introduces a robust event camera-based motion tracking method using gaussian splatting and novel pose parametrization for accurate tracking. |
|
Tao Liu (刘滔) I am a PhD student under joint supervision of ShanghaiTech University and BIGAI, advised by Prof. Jingya Wang and Research Scientist Baoxiong Jia. My current research interests lie in Embodied AI and Vision-and-Language Navigation (VLN). Previously, I obtained my Master degree from the Mobile Perception Lab (MPL) at ShanghaiTech University in 2025, supervised by Prof. Laurent Kneip. There I worked on SLAM, 3DGS and Event Camera. Earlier, I earned my B.E. from Shanghai Maritime University in 2022, working closely with Prof. Tianzheng Wang in the Intelligent Car Lab. |

|
Internships
|
Horizon Robotics Position: Perception Algorithm Intern Duration: December 2024 – March 2025 I participated in the 3DGS+Calib project for an online calibration solution. By taking advantage of the rendering quality and speed of 3DGS to provide an accurate calibration for Cameras and LiDAR. |

|
BOSCH Position: SLAM Algorithm Intern Duration: August 2024 – November 2024 As a strategic intern in the XC department at BOSCH (China), I was part of the vSLAM group. I worked on non-overlapping online calibration solution and was responsible for the online calibration of a multi-sensor system involving cameras and LiDAR. |
Publications
|
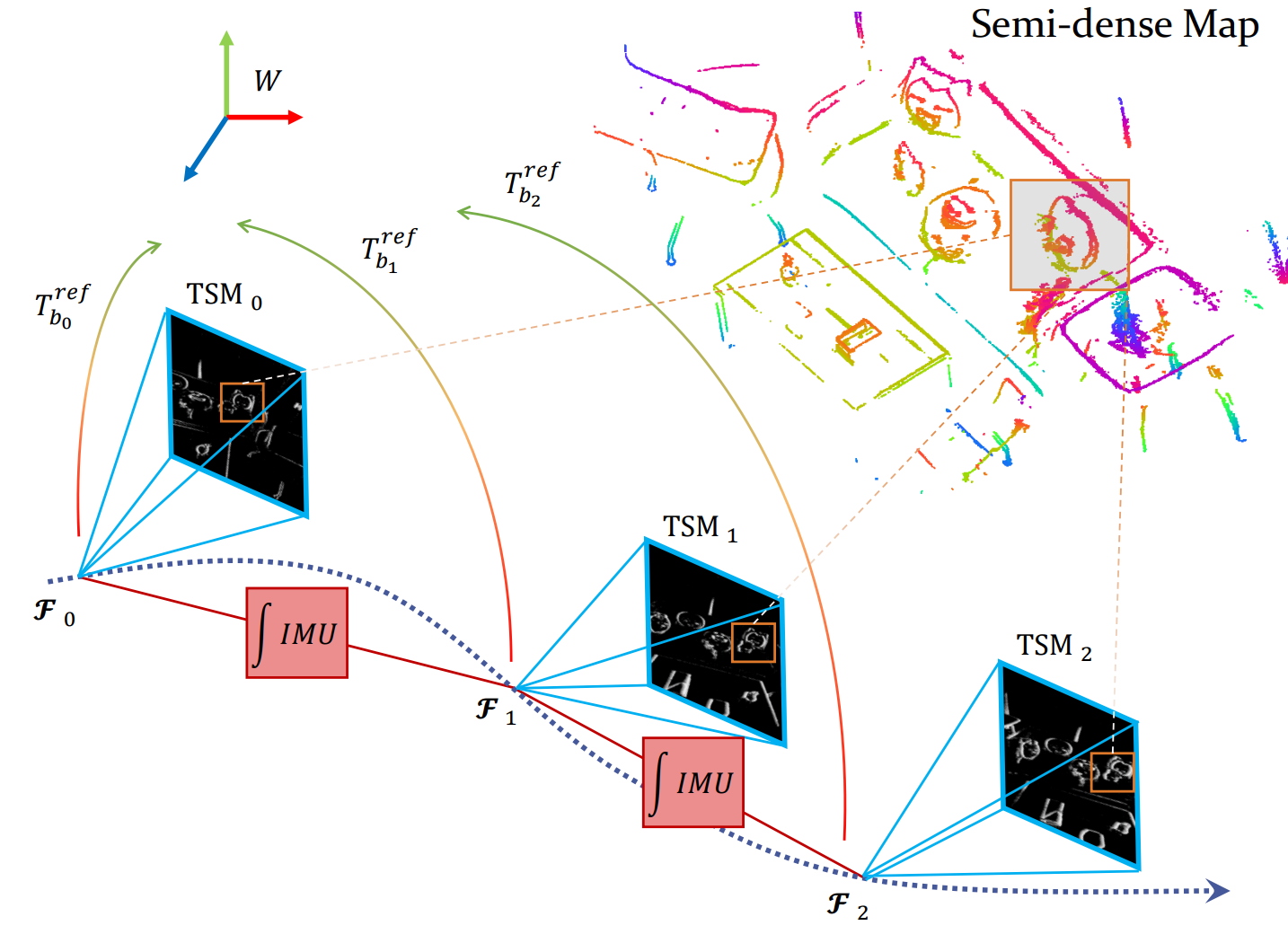
EVIT: Event-based Visual-Inertial Tracking in Semi-Dense Maps Using Windowed Nonlinear Optimization Runze Yuan, Tao Liu, Zijia Dai, Yi-Fan Zuo, Laurent Kneip IROS 2024 Paper | Code | Video This paper follows up on a recently introduced event-based geometric semi-dense tracking paradigm, and proposes the addition of inertial signals in order to robustify the estimation. |
|
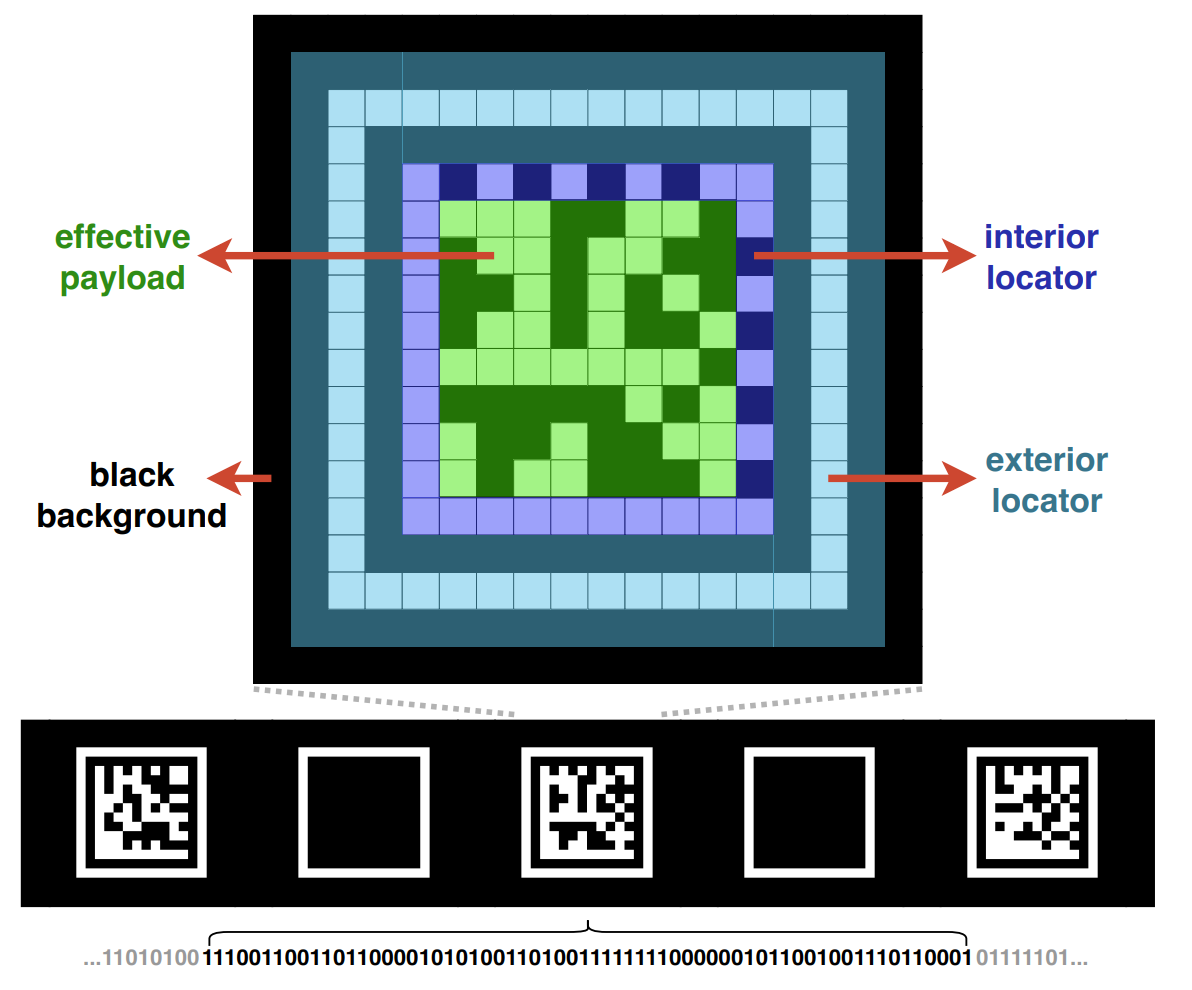
Motion-Aware Optical Camera Communication with Event Cameras Hang Su, Ling Gao, Tao Liu, Laurent Kneip RAL 2024 Paper | Code | Video This paper introduces a dynamic visual marker and design event-based tracking algorithms to achieve fast localization and data streaming. |
Competitions
|
National Undergraduate Intelligent Car Competition Category: AI Track Award: National 2nd Prize Video As team leader, I guided two sophomore students in traditional control algorithms and responsible for designing hardware PCBs and developing AI algorithms for trajectory tracking. |

|
National Undergraduate Intelligent Car Competition Category: SLAM Track Award: National 2nd Prize Video As team member, I initially focused on map building task. Later, I handled object detection using YOLOv5 and debugged the navigation system based on TEB algorithm. |